Geospatial technology has revolutionised the way we understand and interact with the world around us. At the heart of this field is the Global Positioning System (GPS), which provides the positional data that enables everything from navigation to geospatial analytics. While many are familiar with GPS related to everyday navigation apps, only some genuinely understand the advanced techniques behind high-precision geospatial data collection and analysis. Mastering the GPS base and rover system is essential for those looking to push the boundaries of geospatial technology.
How GPS Works: A Brief Overview
Before diving into base and rover systems, it’s helpful to understand the basics of how GPS works. GPS satellites continuously transmit radio signals that broadcast their position and the current time. A GPS receiver on the ground passively picks up these signals from several satellites simultaneously and uses trilateration to calculate its latitude, longitude, and elevation.
Standalone GPS can achieve accuracy in the range of 10-20 meters. While this is sufficient for primary navigation, professional geospatial applications require much higher positional precision—down to centimetres or less. This is where GPS base and rover systems come in.
Introducing the Base and Rover
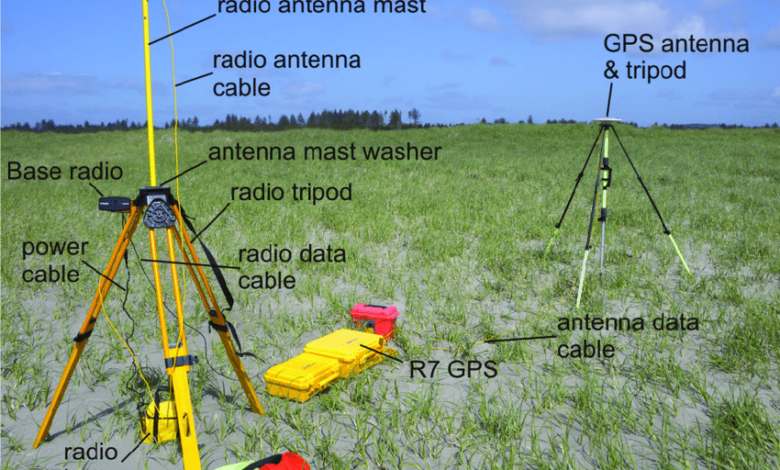
A base and rover system uses two or more GPS receivers working in tandem to achieve high-precision positioning. As the names suggest, a stationary “base” receiver is placed over a known survey marker or reference coordinate. The “rover” receiver is then carried to the points or locations that must be mapped or surveyed.
The base receives and tracks the same GPS signals as the rover. Because the bottom is fixed over a known point, it can calculate minor variations or errors in the GPS signals. The base uses its internet connection to stream corrections to the rover receiver, which applies them in real-time to give precise positioning relative to the ground.
Professional survey-grade base and rover systems can determine 3D positions within a few centimetres horizontally and vertically. When done correctly, this allows highly accurate mapping, survey, and geospatial data collection.
Selecting Base and Rover Hardware
Several manufacturers offer integrated base and rover systems explicitly built for high-precision data collection. Key things to look for include:
Multi-Frequency Support
Most consumer-grade GPS receivers use the L1 frequency alone. Survey-grade rovers and bases should track multiple frequencies like L1/L2/L5 to model atmospheric interference for better accuracy.
RTK Corrections
The base must broadcast real-time kinematic (RTK) corrections to the rover via UHF radio, cellular modem or other means. This enables centimetre-level real-time positioning.
Rugged Design
The units must withstand all-day outdoor operation, rough terrain, Dust, and rain or snow. Look for waterproofing, shock resistance and durable connectors.
Data Formats
The receivers should support industry standard output formats like RINEX, NMEA, and others for integration into various processing software and workflows.
Planning the Base Location
To achieve the highest accuracy, careful base station placement is a must. Here are some essential guidelines:
Known Coordinates
The base must be positioned directly over a survey marker or point with trusted geodetic coordinates. This ties the measurements to an accurate reference frame.
Clear View of Sky
Use a location with a clear sky view in all directions to track the maximum number of satellites possible. Avoid obstructions like tall buildings or trees.
Central Location
Centrally locate the base within (or next to) the project area to minimise the distance between the bottom and the rover. This reduces positioning errors.
Secure Position
Use a sturdy tripod and brace against vibration or bumps. Any tiny shifts will degrade accuracy. Weight down if necessary.
Best Practices for Rover Operation
Following best practices with the rover system is equally important:
RTK Fixed Solution
Wait until the rover achieves an RTK-fixed solution with the base before recording data. This indicates centimetre-level precision.
Low PDOP Values
Check PDOP values on the rover’s interface and avoid recording data when values rise too high. Low PDOP = better accuracy.
Maintain Link with Base
Keep the base and rover within range and avoid obstructions that could block the radio or cellular link between units.
Consistent Height
Take measurements from the same height consistently, usually about 1.5-2 meters off the ground. Variations will reduce vertical precision.
Measurement Duration
Occupying a point for longer averages out errors. Spend at least 5-10 seconds recording data at each location.
Processing Raw Data
The base and rover will produce raw GPS observation files that require post-processing. The software combines the simultaneous observations from both receivers to have the highest accuracy positions. Careful processing can reveal potential issues and ensure quality results.
Proper training and experience go a long way in mastering GPS base and rover setup, operation, and data processing. Following the guidelines above will help ensure reliable, high-precision data collection. As geospatial technology advances, these techniques will grow more powerful and capable.
Conclusion:
Mastering high-precision GPS surveying with a base and rover system opens up professional geospatial applications. With accuracy down to a few centimetres, skilled practitioners can map infrastructure, survey boundaries, document features, and generate precise 3D data for engineering and construction projects. When used correctly, GPS base and rover techniques remain the gold standard for field accuracy and precision. With continued innovation in GPS technology and positioning, these systems will only become faster, more efficient and more accurate. Geospatial professionals who invest the time to truly understand all aspects of base and rover systems will have the skills to take advantage of these advances and stay at the forefront of their industry.